2022 年 12 月,发布 VirtualLab Fusion 2023.1
VirtualLab Fusion 2023新版本更新内容(三)
2023.1版本新特性一览
基本信息


VirtualLab Fusion 2023.1新版本
主要更新方向

VirtualLab Fusion 通过其惊人的快速物理光学技术实现物理光学建模
VirtualLab Fusion 的开发从未停止。 VLF 2023.1*提供:
- 更快的速度
- 更容易使用
- 融合更多物理光学模型
- 更高的透明度
- 多元的仿真控制选择
*我们的客户通常将 VirtualLab Fusion 称为 VLF。 因此,在此功能概述中,我们将 VLF 2023.1 用于代指 VirtualLab Fusion 2023.1。
功能概述(以下为更新内容的详细解释和案例展示):
数据视图
VLF 2023.1数据视图

VirtualLab Fusion 2023.1数据查看方式

光学仿真一般会输出1维或2维的数据结果。VLF 2023.1 应用数据视图窗口来提供用户数据结果。
三维系统视图: 显示基于点对点的物理模型的坐标映射,提供几何光线追迹的结果。
数据阵列: 提供全面的可视化工具,针对2维以及3维等间距采样网格和非等间距采样网格数据。
多组数据阵列: 在仿真过程中,处理多模式或者多波长的光学模型,利用数据阵列包可将多个数据组组合在一起。
辐射数据: 能量度量,比如辐照度,视图可以根据色度学方式中人眼对颜色的敏感程度显示。
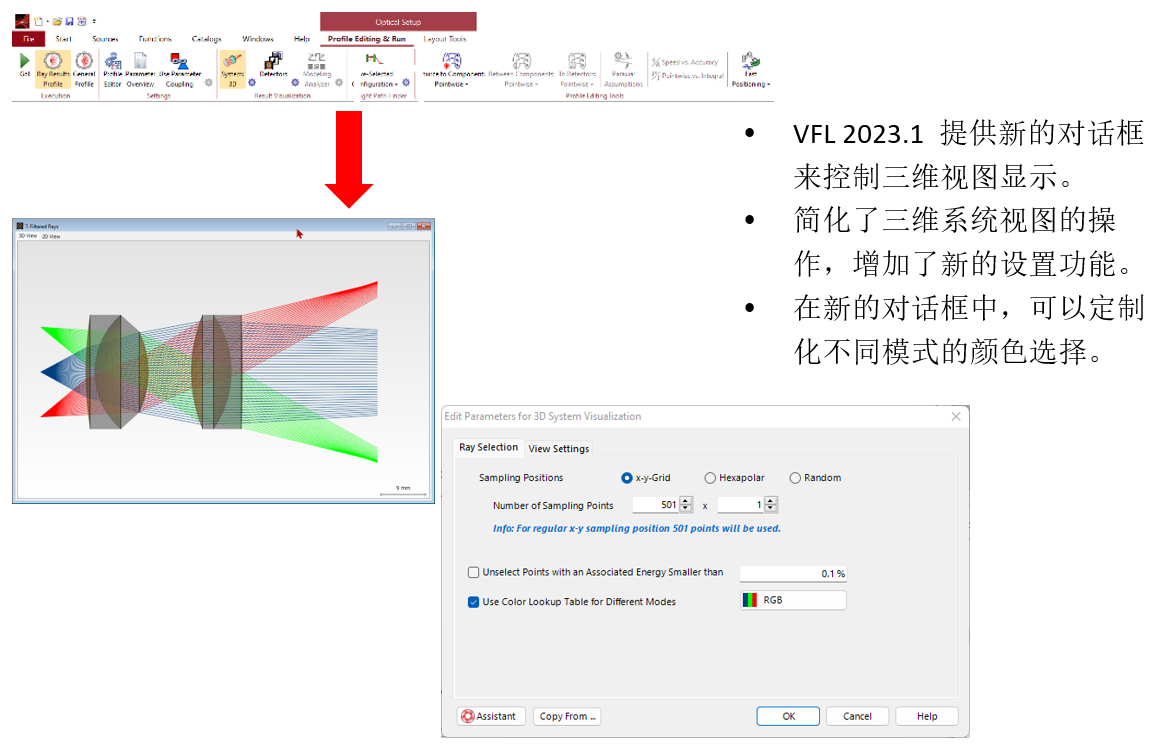
三维系统视图: 新的对话框以及设置选项
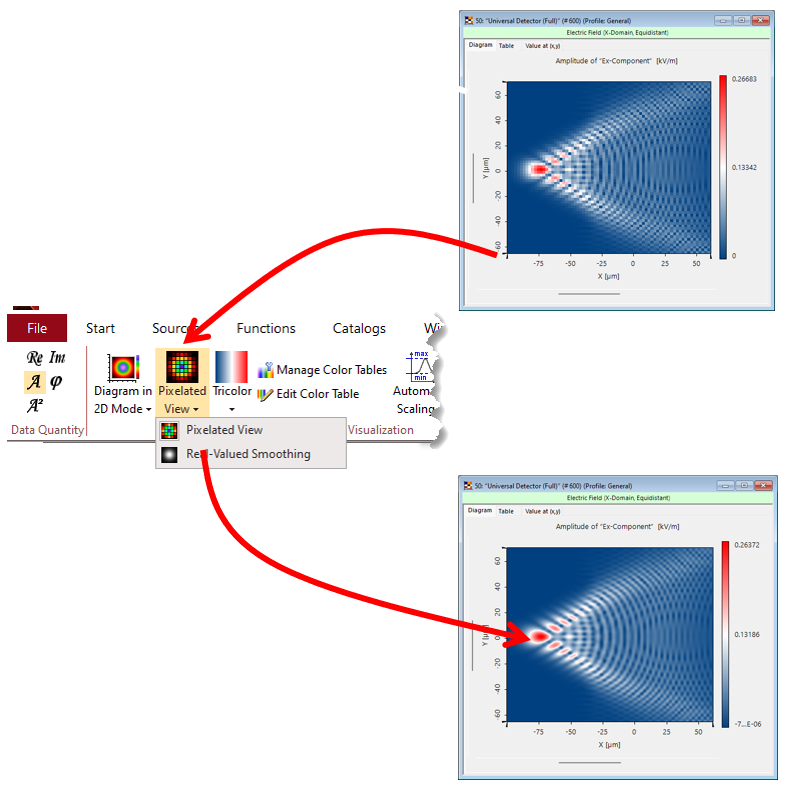
数据阵列视图: 像素数据(Pixelated Data)平滑
• 探测器中的像素越少,探测器评估速度更快。
• 然而,复数型数据通常会有采样过疏问题,导致拟合插值数据失真。
• VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需要更多的采样。
案例1: 光场数值和最近邻插值设置,例如,像素型视图。新的选项提供光滑视图,而不用通过操作(Manipulations) 改变插值。
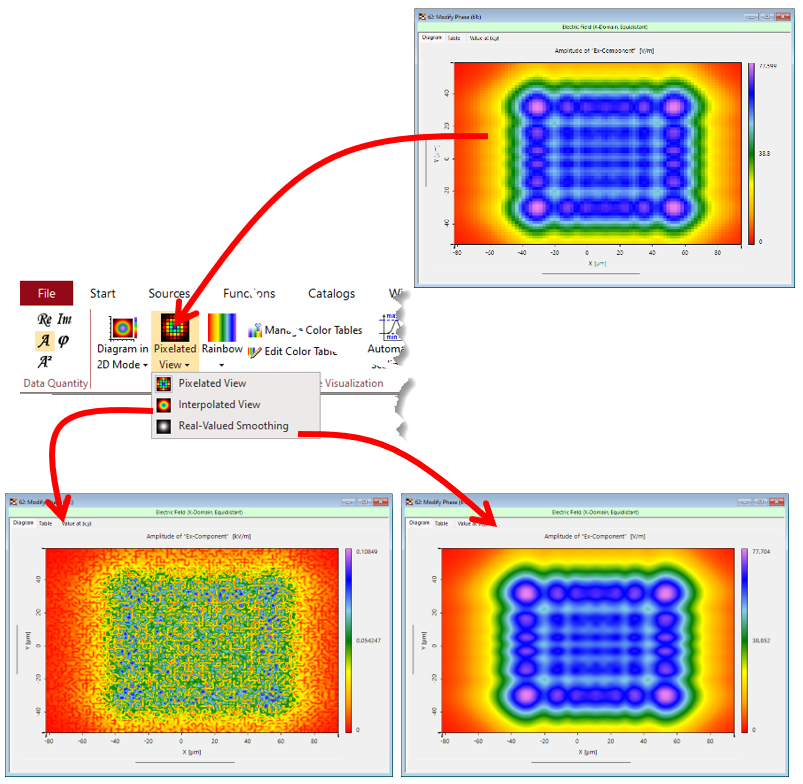
数据阵列视图: 像素数据(Pixelated Data)光滑化
复数型数据通常会有采样过疏问题,导致拟合插值数据失真。
VLF2023.1加入了获取更光滑的可视化数据的选择,而且对于复数型插值处理,不需更多的采样点数。
案例2: 复数型光场数据采用立方插值的设置,它能够激活插值视图(interpolated view)。视图中的散斑是由于复数插值中的随机相位所导致。新增加的选项可以平滑光场中的振幅部分。
 数据阵列视图: 极坐标图(Plolar Diagram)
数据阵列视图: 极坐标图(Plolar Diagram)
• 一维数据可直接从探测器上生成,也可以直接划线从二维数据上提取一维数据。
• VLF 2023.1 增加了极坐标视图选项,针对依赖角度变化产生的一维数据。
• 在属性浏览器(Property Browser) 中可以实现笛卡尔坐标系以及极坐标系可视化的转化。
• 新功能可以直接应用在与角度有关的辐照以及光度的探测器中。
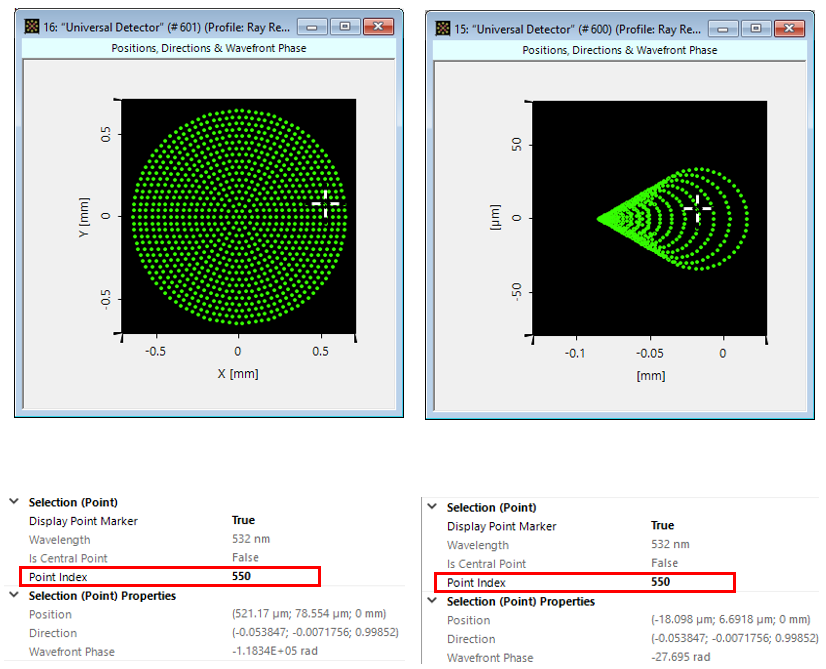
 数据阵列视图:找寻以及点的标识
数据阵列视图:找寻以及点的标识
• 针对逐点操作,可以实现挑选特定点来追踪其映射。
• 所以,在VLF2023.1数据视图(data view)中可以查看选择的点的索引。
• 在典型的工作流程中,用户可查看临近光源上感兴趣的点的索引。V2023.1 可以提供对同一个系统,不同视图中,具有相同点索引的可视化。
• 灵活多样的数据图形功能对于快速生成结果文件至关重要。
• VLF2023.1引入了一个新的功能,可以以阵列方式显示图形结果。
• 工作流程是首先使用一组数据阵列生成位图序列,然后根据该序列生成总览图像(Overview Image)。
 数据阵列视图: 更多的新功能
数据阵列视图: 更多的新功能
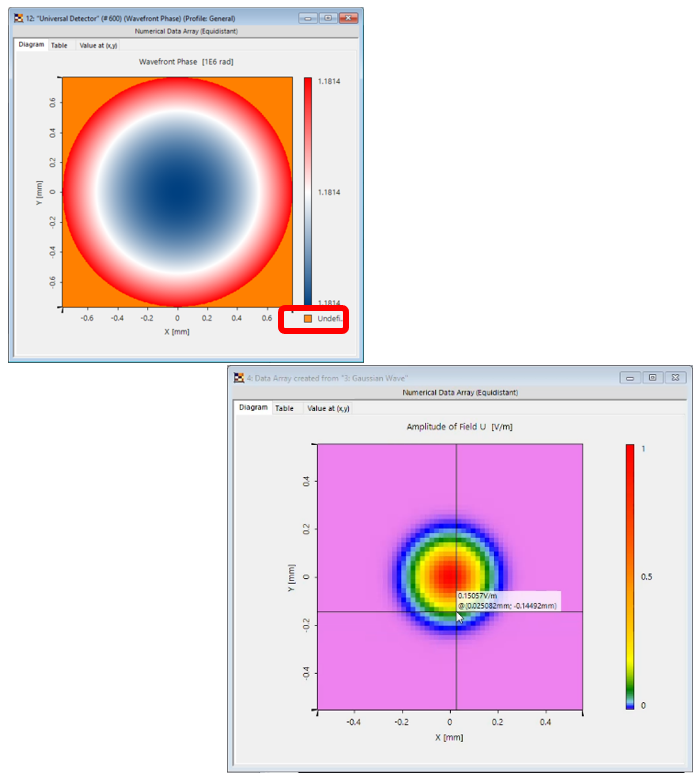
• VFL2023.1可以对未定义区域填充不同的颜色。
• VLF2023.1可以利用鼠标定位,在定位点可显示位置坐标以及该位置对应的参数值。
 Graphics Add-ons提供更多数据视图选择
Graphics Add-ons提供更多数据视图选择
• 除了提供关于光本身的数据视图,如光场的振幅以及相位,辐照度之外,别的信息也可以添加到数据视图中。
• VLF2023.1 中图像组件提供了在数据阵列视图中添加额外的数据信息的功能。
• 该方式可以更普遍应用在数据视图中包含越来越多的几何对象。

Graphics Add-ons提供更多视图选择 |