ПеМфЙтЕїжЦЦї(SLM.0003 v1.0)
гІгУЪОР§МђЪі
1. ЯЕЭГЯИНк
ЙтдД
— ИпЫЙМЄЙтЪј
зщМў
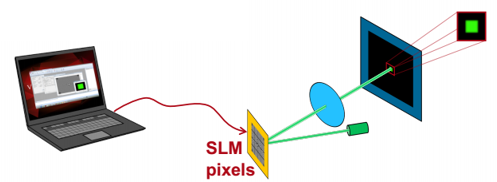
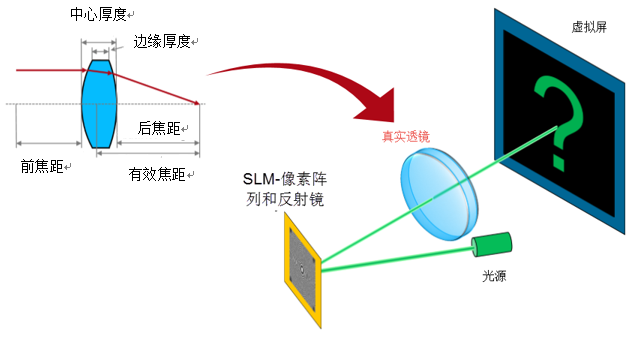
— ЗДЩфаЭПеМфЙтЕїжЦЦїзщМўМАКѓајЕФ2fЯЕЭГ
— ВЛЭЌЕФИЕРявЖЭИОЕЩшМЦ(ЧђУцЃЌЗЧЧђУц) ОпгаВЛЭЌЕФадФмКЭЯёВю
ЬНВтЦї
— ЪгОѕИажЊЕФЗТец
— ИпУБЃЌзЊЛЛаЇТЪЃЌаХдыБШ
НЈФЃ/ЩшМЦ
— ГЁзЗМЃЃК
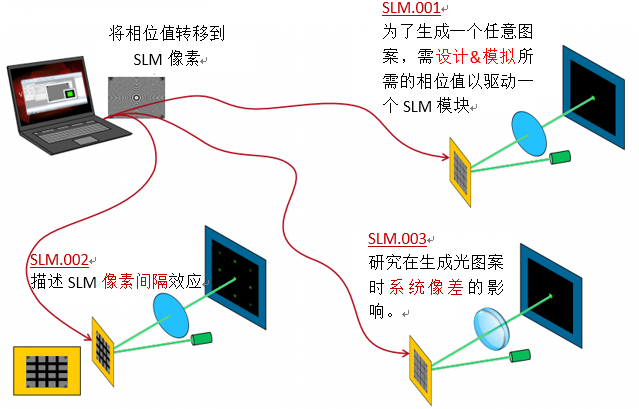
ЛљгкВЛЭЌадФмИЕРявЖЭИОЕЕФSLMЙтЪјећаЮЯЕЭГЕФадФмЦРЙРЁЃ
2. ЯЕЭГЫЕУї
3. НЈФЃ&ЩшМЦНсЙћ
ВЛЭЌецЪЕИЕРявЖЭИОЕЕФНсЙћЃК
4. змНс
ЛљгкВЩгУИЕРявЖЙтбЇЕФSLMЙтЪјећаЮЯЕЭГЕФадФмбаОПЁЃ
РэЯыЙтбЇЯЕЭГВЩгУ2fЯЕЭГДњЬцОпгаЭИОЕЯёВюЕФецЪЕЭИОЕЁЃ
ЗжЮігЩВЛЭЌЧђУцКЭЗЧЧђУцЕФадЖдИпУБЙтЪјжЪСПЕФгАЯьЁЃ
ЙтЪјећаЮгІгУашвЊИпадФмКЭЕЭЯёВюЕФЙтбЇЯЕЭГЃЌШчЗЧЧђУцЯЕЭГЁЃ
гІгУЪОР§ЯъЯИФкШн
ЯЕЭГВЮЪ§
1. ИУгІгУЪЕР§ЕФФкШн
2. ЗТецШЮЮё
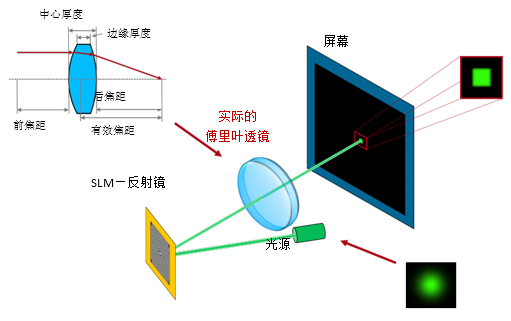
дкжЎЧАЕФАИР§жаЃЌВЩгУСЫРэЯыЕФИЕРявЖЙтбЇЯЕЭГ(2fЯЕЭГ)ЁЃдкНгЯТРДЕФЙЄзїжаЃЌЪЙгУецЪЕЕФЭИОЕНјааЬцЛЛЃЌИУЭИОЕДцдкЖржжЙтбЇЯёВюЁЃ
3. ВЮЪ§ЃКзМжБЪфШыЙтдД
4. ВЮЪ§ЃКSLMЭИЩфКЏЪ§

5. гЩРэЯыЯЕЭГЕНЪЕМЪЯЕЭГ
гУецЪЕЕФИЕРявЖЭИОЕДњЬцРэЯы2fЯЕЭГЁЃ
вђДЫЛсВњЩњЯёВюЃЌЯёВюгЩЫљгУЯЕЭГЕФадФмОіЖЈЁЃ
ЖдгкецЪЕЭИОЕЯЕЭГЕФУшЪіЃЌашвЊБивЊЕФёюКЯВЮЪ§ЁЃ
ЪЕМЪЯЕЭГПЩетбљбЁдёЃКгааЇНЙОрга2fЯЕЭГЯрНќЁЃ
БэИёжаЕФВЮЪ§гыжЎЧАВЩгУЕФ2fЯЕЭГРэЯыжИБъвЛжТЁЃ
гІгУЪОР§ЯъЯИФкШн
ЗТец&НсЙћ
1. VirtualLabжаSLMЕФЗТец
гЩгкПЩвдЧЖШызщМўЃЌVirtualLabПЩвдЧсЫЩЕФЪЕЯжЗДЩфЯЕЭГ(ШчЗДЩфОЕЃЌецЪЕЭИОЕЕШ)ЁЃ
вдвЛИіецЪЕЕФЯЕЭГ(ЫЋЭЙЧђУцЭИОЕ)зїЮЊИЕРявЖЭИОЕЁЃ
ЮЊгХЛЏМЦЫуМгШывЛИіа§зЊЦНУц
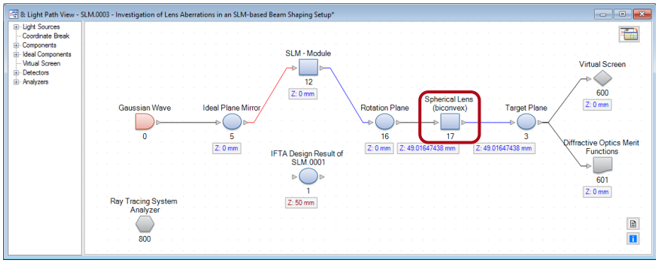
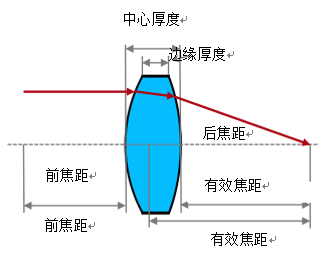
2. ВЮЪ§ЃКЫЋЭЙЧђУцЭИОЕ
ЪзЯШЃЌЪЙгУвЛИіОпгаЯрЭЌЧњТЪАыОЖЕФЫЋЭЙЧђУцЭИОЕЁЃ
гЩгкЖдГЦаЮзДЃЌЧАКѓНЙОрвЛжТЁЃ
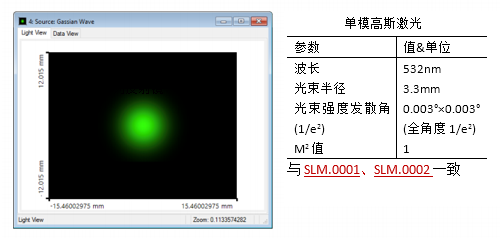
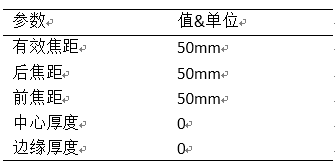
ВЮЪ§ЪЧЖдгІВЈГЄ532nmЁЃ
ЭИОЕВФСЯN-BK7ЁЃ
гааЇНЙОрПЩЭЈЙ§VirtualLabжаЕФЭИОЕМЦЫуЦїНјааМЦЫуЁЃ
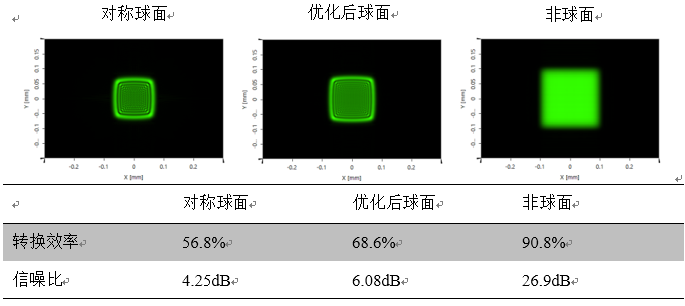
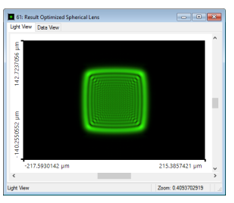
3. НсЙћЃКЫЋЭЙЧђУцЭИОЕ
ЩњГЩЕФРёУБЙтЪјЪЧвЛИіИЩЩцЭМАИЕФЕўМгЃЌИЩЩцЭМАИЕФГіЯжЪБгЩгкЯёВюдьГЩЕФЁЃ
НЯЕЭЕФзЊЛЛаЇТЪ(56.8%)КЭаХдыБШЁЃ
вЛИіЖдГЦЫЋЭЙЯЕЭГВЛФмЬсЙЉКЯЪЪЕФДЋЪфадФмЁЃ
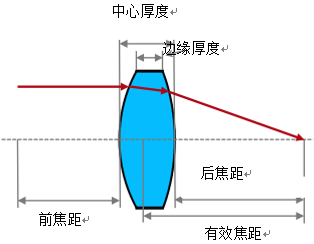
4. ВЮЪ§ЃКгХЛЏЧђУцЭИОЕ
ШЛКѓЃЌЪЙгУвЛИігХЛЏКѓЕФЧђУцЭИОЕЁЃ
ЭЈЙ§гХЛЏЧњТЪАыОЖЛёЕУзюаЁВЈЯёВюЁЃ
гХЛЏЛёЕУВЛЭЌЧњТЪАыОЖЃЌвђДЫЪЧвЛИіЗЧЖдГЦЯЕЭГаЮзДЁЃ
ЭИОЕВФСЯЭЌбљЮЊN-BK7ЁЃ
ЙигкЪЙгУVirtualLabНјааЭИОЕгХЛЏЕФИќЖраХЯЂВЮПМЪОР§BDS.0003
5. НсЙћЃКгХЛЏЕФЧђУцЭИОЕ
гЩгкЧђУцЯёВюЃЌдйДЮЩњГЩвЛИіИЩЩцЭМбљЁЃ
зЊЛЛаЇТЪ(68.6%)КЭаХдыБШвЛАуЁЃ
вЛИігХЛЏЕФЧђУцЯЕЭГЭЌбљВЛФмЬсЙЉКЯЪЪЕФДЋЪфадФмЁЃ
6. ВЮЪ§ЃКЗЧЧђУцЭИОЕ
ЕкШ§ЃЌДгAsphericonжабЁдёвЛИіЗЧЧђУцЭИОЕ(РраЭЃКA25-50LPX)ећКЯЕНSLMЯЕЭГЁЃ
ЗЧЧђУцЭИОЕВФСЯЭЌбљЮЊN-BK7ЁЃ
ИУЭИОЕДгVirtualLabЕФЭИОЕПтжаЕМШыЁЃ
ЙигкЪЙгУVirtualLabНјааЭИОЕгХЛЏЕФИќЖраХЯЂВЮПМЪОР§BDS.0003
7. НсЙћЃКЗЧЧђУцЭИОЕ
ЩњГЩЦкЭћЕФИпУБЙтЪјаЮзДЁЃ
ВЛНіШчДЫЃЌзЊЛЛаЇТЪ(90.8%)КЭаХдыБШЖМЗЧГЃКУЁЃ
ЗЧЧђУцЭИОЕвдМИКѕСуЯёВюНЋSLMКЏЪ§зЊЛЛГЩИпУБЙтЪјЁЃ
8. змНс
ЛљгкВЩгУИЕРявЖЙтбЇЕФSLMЙтЪјећаЮЯЕЭГЕФадФмбаОПЁЃ
РэЯыЙтбЇЯЕЭГВЩгУ2fЯЕЭГДњЬцОпгаЭИОЕЯёВюЕФецЪЕЭИОЕЁЃ
ЗжЮігЩВЛЭЌЧђУцКЭЗЧЧђУцЕФадЖдИпУБЙтЪјжЪСПЕФгАЯьЁЃ
ЙтЪјећаЮгІгУашвЊИпадФмКЭЕЭЯёВюЕФЙтбЇЯЕЭГЃЌШчЗЧЧђУцЯЕЭГЁЃ
РЉеЙдФЖС
РЉеЙдФЖС
ПЊЪМЪгЦЕ
ИУгІгУЪОР§ЯрЙиЮФМўЃК
|